Critter Crunch Robot #1 |

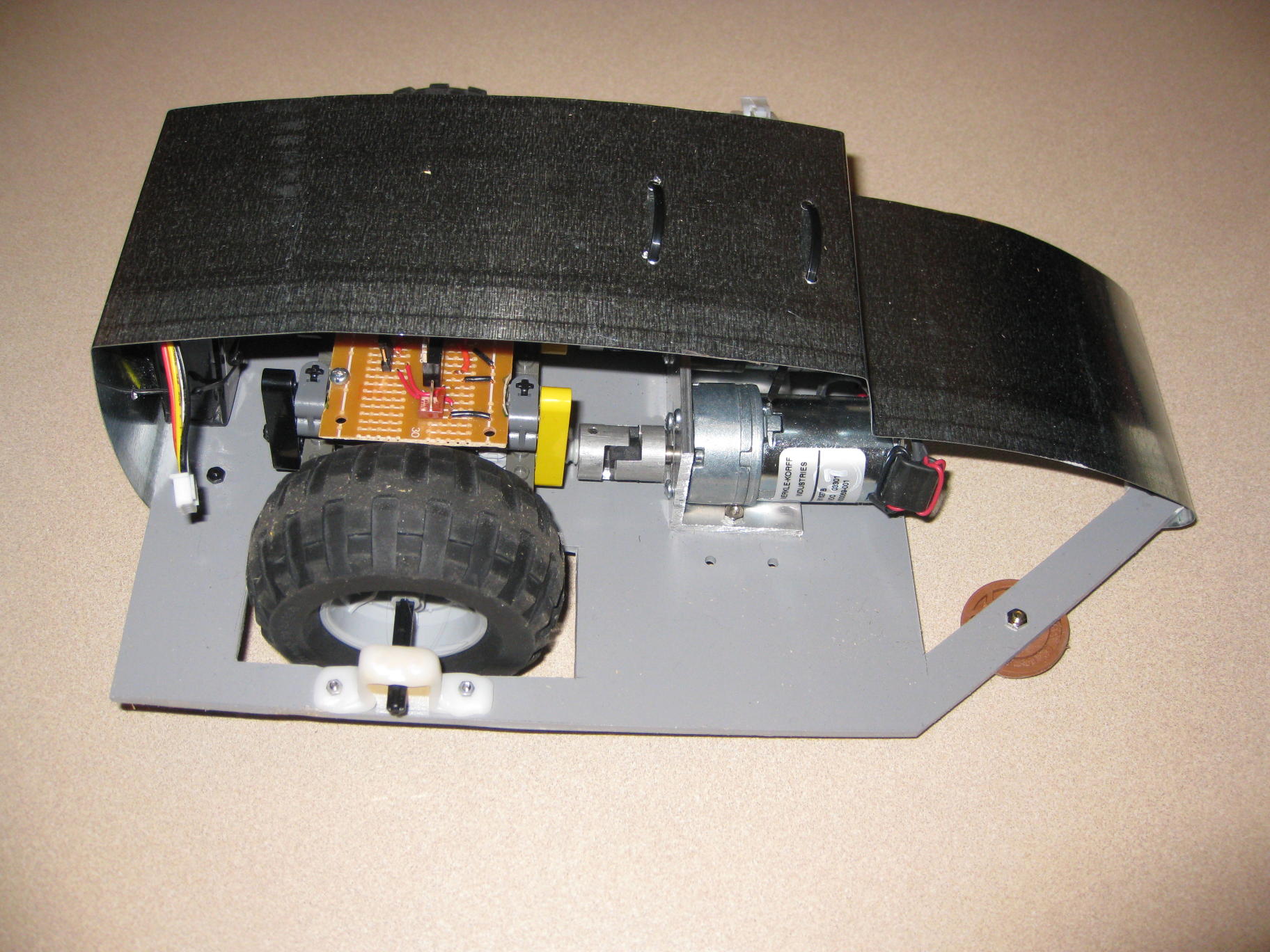
...and with its guts exposed |
Critter Crunch Robot #1 my first entry into the MileHiCon "Critter Crunch" contest |
This year I entered the MileHiCon's Critter Crunch contest for the first time. My entry was a simple two-wheeled robot controlled remotely via Bluetooth.
|
Critter Crunch Robot #1 |
...and with its guts exposed |
This robot uses two 12V gearmotors obtained a few years ago from some surplus shop, connected via spider couplers (Jameco) to LEGO axels. These go through a small LEGO gearbox which further reduce the speed and effect a 90-degree axis change, to drive large LEGO tires and wheels. The chassis is made of expanded PVC, cut with a hobby knife. The LEGO gearbox and pillow blocks are bolted to the chassis via some custom frames made with Shapelock.
The electronics consist mainly of a Sparkfun BlueSMiRF Silver, which speaks to the built-in Bluetooth on my MacBook, and a Pololu Qik 2s9v1 Dual Serial Motor Controller. These are powered via a 5V regulator from the same 11.1 V, 1250 mAh LiPo battery that powers the motors. Despite having no capacitors, I didn't notice any problems of electrical noise.
The body was made from duct metal bought at the local hardware store, cut with tin snips. The weight of the motors, plus the pressure from the body, caused the chassis to bow a bit, so I added sliders on the front at the part that was rubbing against the floor.
Weight was a constant issue as I was trying to finish this bot, which accounts for the skimpy body. You can see the weight of the various parts in the table below; the contest limit was 32 oz.
| Weight Budget | |
|---|---|
| motors | 12.3 oz |
| battery | 3.5 oz |
| chassis | 3.1 oz |
| wheels, tires, axles | 2.9 oz |
| body | 2.6 oz |
| motor bracket | 1.8 oz |
| gearbox | 1.6 oz |
| electronics | 0.8 oz |
| board holder | 0.7 oz |
| couplers | 0.7 oz |
| fasteners | 0.6 oz |
| battery cable | 0.3 oz |
| pillow blocks | 0.2 oz |
| casters | 0.2 oz |
| Total: | 31.3 oz |
This bot didn't fare well against the competition; it won only one of its eight matches, and that was against an autonomous robot submitted remotely from England that had only a single sensor. The most crucial problem was that my robot was simply too slow. It moved thoughtfully around the ring, and didn't stand a chance against its much faster opponents.
However, all systems functioned as designed with perfect reliability. There were no mechanical failures, no radio interference, no problems with the batteries. I've done enough robot events by now to know that Murphy's Law is always in full force at a competition or demo, so I was pleased to see that my robot held itself together so well, despite getting shoved off the platform repeatedly!